Hello!
Before you start reading the posts below, have a quick look at our “About” page (link is above) to see how to use our web page most effectively!
Hello!
Before you start reading the posts below, have a quick look at our “About” page (link is above) to see how to use our web page most effectively!
Description of the Movement:
The dexterity of the hand is generally defined under two categories; power grips and precision grips. Precision unlike power grips are used with the intention of increased control as opposed to increased strength. Precision grips is then sub categorised into two groups (Figure 1);
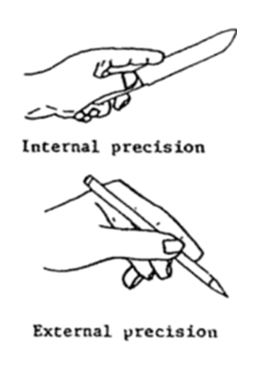 Figure 1: Types of Precision Grips (Kanowski & Marras 1998)
Figure 1: Types of Precision Grips (Kanowski & Marras 1998)
The pinch grip is a form of precision grip where by an object is pinched between the palmar surface of the fingers and the opposing thumb. The pinch grip is also then categorised into five groups (Loudon, Swift & Bell 2008);
Muscles Involved in the Two-Point Tip Pinch Grip:
During this movement the thumb is opposed and flexed while the fingers are flexed at the MCP, PIP and the DIP. In this grip compression is mainly produced by the extrinsic muscles of the hand (flexor digitorum superficialis, flexor digitorum profundus and palmaris longus) but also assisted by the metacarpophalangeal-joint flexion force of the interossei, flexor pollicis brevis combined with the adducting force of the adductor pollicis. Phalangeal rotation is adjusted by interossei and by the lumbricals. The opponens also provides assist through rotational positioning of the first metacarpal (Long et al. 1970).
 Figure 2: Anatomical position of Intrinsic muscles of the hand; provide fine motor control of the fingers primarily in the pinch grip through distal and proximal phalangeal flexion and adduction of the 1st digit through the use of thenar muscles (OpenStax College 1999).
Figure 2: Anatomical position of Intrinsic muscles of the hand; provide fine motor control of the fingers primarily in the pinch grip through distal and proximal phalangeal flexion and adduction of the 1st digit through the use of thenar muscles (OpenStax College 1999).
Innervation:
Median Nerve:
The median nerve takes precedence in innervations of fine precision and pinch functions of the hand. It originates from the lateral and medial cords of the brachial plexus (C5-T1). During the pinch movement, the median nerve supplies digits 2 and 3 extrinsic flexion to the thumb; the motor branch supplying flexor digitorum superficialis while the anterior interosseus branch innervates the flexor pollicis longus and flexor digitorum profundus muscles.
The median nerve also supplies the thenar eminence. As the median nerve passes through the carpal tunnel, the recurrent motor branch innervates the thenar muscles (abductor pollicis brevis, opponens pollicis, and superficial head of flexor pollicis brevis). It also innervates the index and long finger lumbrical muscles. Sensory digital branches provide sensation to the thumb, index, long, and radial side of the ring finger.
Ulnar Nerve:
The ulnar nerve mainly takes part during power grips however it does supply the medial half of the flexor digitorum profundus (digits 4-5) through its motor branches, as well as provides sensation to the medial 1 and a half fingers of the hand. The ulnar nerve also takes part in the pinch grip by providing innervations to all interossei and 2 ulnar lumbricals; adductor pollicis and the deep head of flexor pollicis brevis (Wilhemi & Gest 2013).
Clinical Aspects:
If an individual is unable to pinch their index finger and thumb, a pathological indication of damage to the anterior interosseous nerve between the two heads of the pronator muscle is concluded. This is known as anterior interosseous nerve syndrome (AINS). AINS can be caused by compression of the nerve between the heads of the pronator teres muscle. The anterior interosseous nerve can also become prone to entrapment in select individuals with abnormalities such as an atypical head of the flexor pollicis longus muscle; found in approximately 52% of the population (Jones & Gallard 2014).
Try it yourself!
Do the ‘pinch test’ by forming an ‘OK’ sign with your thumb and index finger, being able to do this indicates your anterior interosseous nerve is functioning normally!
References:
Jones, J & Gallard, F 2014, RadioPaedia.org, accessed 25 April 2016, <http://radiopaedia.org/articles/anterior-interosseous-nerve-syndrome-1>.
Karowski, W & Marrras, WS 1998, Types of Precision Grips, digital image, The Occupational Ergonomics Handbook, CRC Press, London.
Long, C, Conrad, PW, Hall, EA & Furler SL 1970, ‘Instrinic-Extrinic Muscle Control of the Hand in Power Grip and Precision Handling’, The Journal of Bone & Joint Surgery, vol. 52, no. 5, pp. 853-867.
Loudon, JK, Swift, M & Bell, S 2008, The Clinical Orthopedic Assessment Guide, 2nd edn, Human Kinetics, United States.
OpenStax College 1999, Intrinsic Muscles of the Hand, digital image, Rice University, accessed 25 April 2016, <https://cnx.org/contents/FPtK1zmh@6.15:fEI3C8Ot@5/Preface>.
Whihelmi, BJ & Gest, TR 2013, Medscape, accessed 25 April 2016, <http://emedicine.medscape.com/article/1285060-overview#a6>.
Introduction
Power grips are the strongest among all different grips that can be made by humans. Fingers flex to clench an object and forces generated by muscles hold the object firmly and keep it in contact with the palm.
Description of movement
Unlike precision grips, power grips can be distinguished by dynamic and static phases. Dynamic phases involve opening of the hand and thumb while adjusting the fingers to take up a suitable position for grasping an object. Static phases involve fine adjustment of the fingers to assume the shape of the object. Also, muscular antagonism between upper limb digits and middle hand compartments (involving both extrinsic and intrinsic muscles of the hand) is shown in power grip whilst antagonism of interdigital or contradigital antagonism dominates in precision grip, since use of fingertips to hold object is more important (Landsmeer 1962, pp. 164-165)
Execution of power grip can be divided into 4 stages:

Figure A. 5 subclasses of power grip can be performed during transition to the static phase. For instance, spherical grip involves opposition of the thumb and lateral rotation both the little and ring fingers while cylindrical grip involves the ring and little fingers laterally rotated to a maximum (Gelder 2012).
*Did you know?
Hook grip
Hook grip involves flexion digits 2-5 to hold the object in a hook-like manner. Unlike other sub-classes of power grip, the thumb is only involved as a stabilizer and is not involved in weight baring of the object. It also consumes less energy from the long tendons of the fingers (flexor digitorum profundus and superficialis). The thenar muscles are not involved! (Long et al. 1970).

Figure B. A photo representing an example of hook grip. As shown MCP joint is extended (flat middle hand) and both IP joints are flexed to some extent while thumb is not involved in enduring the weight apparently. (Aibolita.com)
Muscles involved
Extension of the MCP joints and flexion of the IP joints are essential in the hook grip. Hence the flexor group of the anterior forearm (flexor digitorum profundus, superficialis and flexor pollicis longus) and extensor digitorum are indespensible for the grip to be executed normally. Also intrinsic muscles (thenar and hypothenar) plus deep muscles (lumbricals and interossei) play important role during the static phase (Long et. al. 1970).
During the power grip, extrinsic muscles are used extensively to provide force for gripping while intrinsic muscles, especially the lumbricals (except 4th) are rarely used. On the other hand, intrinsic muscles (both interossei and lumbricals) are used extensively for abduction, adduction and fine positioning of fingers. Specific extrinsic muscles are recruited for supplying compressive forces and gross motion (Long et al. 1970).
Nerve innervation
The nerves that innervate the hand are median, radial (mainly the superficial branch that supplies the dorsum of the hand) and the ulnar nerve (Pather 2016).
In relation to grip, the median nerve supplies flexor digitorum superficialis, flexor pollicis longus and the lateral half of flexor digitorum profundus. The ulnar nerve supplies the medial half of flexor digitorum profundus, the lumbricals 3 and 4 as well as all interossei muscles. Radial nerve supplies extensor digitorum (Pather 2016).

Figure C. A diagram showing innervation of the palm and dorsum of the hand by three different branches off the brachial plexus. Note the palmar side of the lateral 3.5 digits, finger nails and tips are supplied by the median nerve while both sides of medial 1.5 digits of the hand are supplied by ulnar nerve. Superficial branch of radial hand supplies the rest. (Sanchez 2011)
*Did you know?
Carpal tunnel syndrome, which is signified by compression of the median nerve results in the loss of precision grips due to dysfunction of the thenar muscles (except adductor pollicis). It is also characterized by decreased size in the thenar eminence which leads to loss of opponens action, especially in power grip (Pather 2016).
References
Aibolita.com, Collateral Ligaments of Metacarphophalangeal and Interphalangeal Joints of Third Digit, digital image, accessed 5 May 2016, <http://aibolita.com/sundries/12093-collateral-ligaments-of-metacarpophalangeal-and-interphalangeal-joints-of-third-digit.html>.
Gelder, LV 2012, 5 different types of grip, Grip Strength Tools, digital image, Dynamic Principles, accessed 5 May 2016, <https://dynamicprinciples.wordpress.com/2012/04/05/grip-strength-tools/>.
Landsmeer, JMF 1962, ‘Power grip and precision handling’ Annals of the Rheumatis Diseases, vol. 21, no. 2, pp. 164-170.
Long, C, Conrad, PW, Hall, EA & Furler, SL 1970, ‘Intrinsic-Extrinsic Muscle Control of the Hand in Power Grip and Precision Handling’, The Journal of Bone and Joint Surgery, vol. 52, no. 5, pp. 853-867.
Pather, N 2016, ‘Upper Limb Nerve Lesions’. lecture presented to ANAT2451-ANAT3141, University of New South Wales, NSW, 4 April 2016.
Sanchez, M 2011, Sensory supply of the hand, digital image, accessed 5 May 2016, <https://quizlet.com/6103165/anatomy-hand-flash-cards/>.
Basic Grip Explanation
The cylindrical power grip generates the maximum gripping force possible by hand (Hedge 2013). It is an important movement that is performed daily when grasping heavy cylindrical objects or anything that has a handle like a bar or hammer as can be seen in figure 1.

Figure 1: Basic cylindrical grip (Quizlet Incorporated, 2016)
Detailed Anatomy of the Grip
Hand Positioning
As can be deduced from figure 1 the grip is characterised by the flexion of digits 2-5 and flexion and adduction of the thumb around the object but in opposing directions, i.e. if digits 2-5 wrap around the object anti-clockwise the 1st digit (thumb) will wrap clockwise.
The thumb is set at an angle to the plane of the palm and its movements are described differently to those of the other digits (O’Rahilly, Catlin & Lyons 2008). This difference in the orientation (or plane of movement) of the thumb compared to digits 2-5 is a crucial anatomical feature of the hand that allows for this opposing direction and a much stronger grip (Napier 1956).
Major Movers: Extrinsic Hand Muscles
As is the case in most power grips the extrinsic muscles play a key role in the movement providing the major force (O’Rahilly et al. 2008). There are three extrinsic hand muscles that provide the vast majority of power generated in the cylindrical grip. These are all long flexors in the anterior compartment of the forearm and are Flexor Digitorum Superficialis, Flexor Digitorum Profundus and Flexor Pollicis Longus.
Flexor Digitorum Profundus (FDP) (figure 6 below) powerfully draws the digits 2-5 against the object being grasped pressing it against the palm of the hand. FDP provides the greatest portion of power and tension to the grip due to flexion of the distal interphalangeal joints around the object (Landsmeer 1962).
Grip a handle as tight as you can. Now relax and extend the distal interphalangeal joint and feel how much you grip weakens!
Flexor Pollicis Longus (FPL) as can be seen in figure 6 below, attaches to the distal phalanx of the 1st digit (thumb) much like that of FDP on digits 2-5 albeit on a different plane. This muscle allows the thumb wrap around the object creating a closed and much tighter grip.
Flexor Digitorum Superficialis (FDS) (figure 7 below) has its distal attachment on the shaft of the middle phalanx of digits 2-5 and flexes the proximal interphalangeal joints of those digits. This muscle assists FDP to provide greater tension in the flexed position.


Minor Movers: Intrinsic Hand Muscles
There are some intrinsic hand muscles that assist in the positioning of the digits through action on the metacarpophalangeal and some carpometacarpal joints. The positioning adopted gives the optimal power to the grip.
Firstly, the thumb is adducted at both the metacarpophalangeal and carpometacarpal joints. This is in direct contrast to precision movements where the result is the pad of the thumb in contact with the pad of digits 2 and 3 (Landsmeer 1962). Adductor Pollicis (figure 8 below) is the muscle responsible for this adduction of the thumb.

Figure 4: Palmar surface of the hand with adductor pollicis attached. (UNSWb, 2016, p24)
Secondly, not only do the fingers flex to the size of the object held and press the object against the palm of the hand, they are also laterally rotated and incline towards the ulnar side of the hand (Landsmeer, 1962). The 4th Dorsal Interossei brings the metacarpophalangeal joints of digit 4 to a state of maximum lateral rotation and Abductor Digit Minimi does the same for digit 5. These muscles can only contribute to contribute rotation when fingers are partially flexed.

Figure 5: Position of the fingers in the cylindrical grip. The ring and little fingers are laterally rotated to a maximum (Landsmeer, 1962)
Table 1 below summarises their respective roles in the cylindrical grip.
| Table 1: Extrinsic and Intrinsic Hand Muscles Important for Cylindrical Power Grip | |
| Muscle | Relevance to the Cylindrical Power Grip |
| Flexor Digitorum Profundus | Powerfully flexes the distal interphalangeal joints of digits 2-5. Provides the greatest proportion of power to the grip. |
| Flexor Digitorum Superficialis | Flexes the proximal interphalangeal joints of digits 2-5. Assists Flexor Digitorum Profundus. |
| Flexor Pollicis Longus (FPL) | Flexes distal phalanx of digit 1. Allows the thumb to wrap around the object for a tighter grip. |
| Adductor Pollicis | Adducts digit 1 toward the lateral border of the palm and provides the angle for counter force against the flexed digits 2-5. |
| 4th Palmar Interossei | When the digit 4 is flexed, provides lateral rotation to increase tension |
| Abductor Digiti Minimi | When the digit 5 is flexed, provides lateral rotation to increase tension |
Other Functional Considerations
Varying the weight of the grasped object
As mentioned previously the thumb is set on a different plane to that of the palm. Napier identified a thumb placement variation in the cylindrical grip that occurs according to the weight of the object being grasped. As can be seen in figures 2-4, the heavier the object becomes the further the thumb adducts and wraps around the object. This variation confirms that the thumb significantly increases the strength of the grip.

Figure 6: Holding a pin hammer (Napier, 1956)

Figure 7: Holding a Warrington hammer (Napier, 1956)

Figure 8: Holding a cross-pein hammer (Napier, 1956)

Figure 9: Holding a ball-pein hammer (Napier, 1956)
This means there can be an element of precision in the power grip through pulp surface of the thumb pressed against the grasped object (when the object is not heavy) (Figure 2). As the object gets heavier the ability of precision decreases and the thumb becomes more abducted and eventually crosses over the object to providing maximal power as can be seen in figures 3-5 (Napier 1956).
Grip strength varies according to the flexion/extension of the wrist and pronation/supination of the forearm. Different orientations of the wrist and forearm result in certain muscles shortening and extending. The length-tension relationship in muscles (Gordon, Huxley & Julian 1966) means a change in length of a muscle will affect the ability of that muscle to create tension (or in our case grip strength).
Terrell and Purswell (1976) established that a supinated forearm and a neutral wrist position results in the maximum grip strength. Table 2 below shows the percentage grip strength possible at various wrist and forearm orientations.
| Table 2: Grip strength for various wrist and forearm positions | |||||
| Forearm Position |
Wrist Positions |
||||
| Neutral | Flexion | Hyper-extenion | Radial Flexion | Ulnar Flexion | |
| Pronation | 88 | 57 | 69 | 74 | 75 |
| Mid Position | 99 | 70 | 77 | 72 | 83 |
| Supination | 100 | 73 | 77 | 83 | 86 |
| Note. Reprinted from Terrell and Purswell (1976) | |||||
References
Gordon, A, Huxley, AF & Julian, F 1966, ‘The variation in isometric tension with sarcomere length in vertebrate muscle fibres’, The Journal of physiology, vol. 184, no. 1, p. 170.
Hedge, A 2013, Cornell University, accessed 26 April 2016, <http://ergo.human.cornell.edu/studentdownloads/DEA3250pdfs/grips.pdf>.
Landsmeer, J 1962, ‘Power grip and precision handling’, Annals of the Rheumatic Diseases, vol. 21, no. 2, pp. 164-170.
Napier, JR 1956, ‘The prehensile movements of the human hand’, Bone & Joint Journal, vol. 38, no. 4, pp. 902-913.
O’Rahilly, R, Catlin, B & Lyons, J 2008, Basic Human Anatomy, Darmouth Medical School, Darmouth.
Quizlet Incorporated, 2016, accessed 26 April 2016, <https://quizlet.com/76433165/ch-11-12-13-hand-grips-flash-cards/>.
Terrell, R & Purswell, JL 1976, ‘The influence of forearm and wrist orientation on static grip strength as a design criterion for hand tools.’ paper presented at the Proceedings of the Human Factors and Ergonomics Society Annual Meeting.
